AVR i Linux
Wstęp
Zakładam, że wchodząc tutaj, masz chociaż podstawowe pojęcie o AVR-ach Atmela, Linuksie i że trzymałeś kiedyś w ręku lutownicę. Ta strona zawiera informacje o tym, jak za pomocą Linuksa i skrawka sprzętu można zacząć zabawę z tymi mikrosterownikami. Ja w tym celu kupiłem AT90S2313, który kosztuje około 5zł i parę innych drobazgów. 12 końcówek portów, 2kB pamięci Flash programu, 128b RAM, 128b EEPROMu, 2 liczniki, 2 zewnętrzne przerwania i UART powinny na początek wystarczyć każdemu. Mimo to, przedstawione tutaj informacje będą prawdziwie również dla większości mikrokontrolerów rodziny AVR.
Uwaga! Nieprawidłowe połączenie układów elektronicznych może spowodować uszkodzenie komputera, pożar i inne kataklizmy. Zamieszone tutaj informacje są udostępnione bez żadnych gwarancji itp. itd. U mnie wszystko działa bez problemu, ale nie mogę odpowiadać za szkody powstałe w wyniku użycia układu bazującego na moim schemacie. Twój port równoległy może być mniej odporny na sprzęt inny niż drukarki spełniające warunki CE.
Programator i układ uruchomieniowy
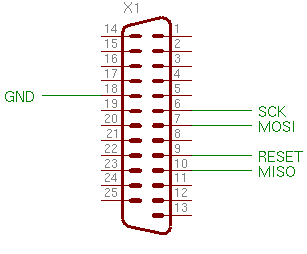
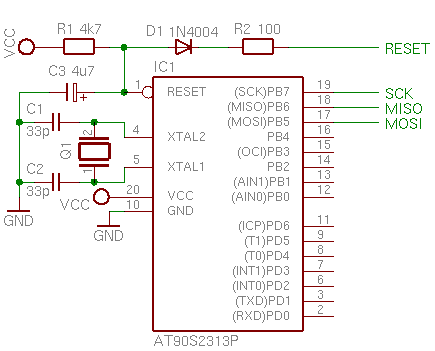
AVR-y najłatwiej programować przez interfejs SPI, który wymaga jedynie trzech linii sygnałowych (SCK, MISO, MOSI) oraz jakiegoś sposobu przełączenia w tryb programowania (RESET na niski). Jeśli Twój komputer ma jeszcze port równoległy, możesz podłączyć w następujący sposób:
Jest to minimalna wersja programatora STK200 (brak bufora 74HC244), który jest obsługiwany przez większość oprogramowania dla AVR-ów. Dla uproszczenia całego układu zrezygnowałem z przełączania wyprowadzeń PB5, PB6 i PB7 między programatorem, a urządzeniami peryferyjnymi.
W przypadku braku portu równoległego można złożyć albo kupić *) programator z interfejsem USB jak np. USBasp.
Można teraz podłączyć różne głupoty do portów — diody, przyciski, wyświetlacze, konwertery TTL<->RS232 itp. Wszystko to zależy od tego, co chcesz zrobić.
*) Problem jajka i kury – trzeba zaprogramować AVR-a, żeby zaprogramować AVR-a.
Oprogramowanie
Jednym z wygodniejszych rozwiązań jest użycie kompilatora gcc. Dzięki temu nie trzeba uczyć się kolejnego asemblera — wystarczy poznać wnętrze mikrosterownika i sposób jego obsługi. By zbudować środowisko niezbędne do kompilacji i uruchamiania kodu na AVR-y należy zaopatrzyć się w:
Jeśli Twoja dystrybucja Linuksa jest oparta o pakiety RPM, najłatwiej będzie
pobrać oprogramowanie z projektu CDK4AVR.
PLD Linux zawiera specyfikacje odpowiednich
pakietów do samodzielnej kompilacji (crossavr-binutils, crossavr-gcc,
crossavr-libc i avrdude). W Debianie to gcc-avr, binutils-avr,
avr-libc itd. Gdyby jednak zaszła potrzeba samodzielnej kompilacji,
binutils i gcc należy skompilować po uprzednim uruchomieniu skryptu
./configure z parametrem --target=avr, a avr-libc z parametrem
--host=avr. Programatory są aplikacjami działającymi na stacji roboczej, więc
kompiluje się je tak samo jak zwykłe oprogramowanie.
Przykład
Po zainstalowaniu wszystkiego, możemy napisać prosty program:
#define F_CPU 1000000L /* Częstotliwość kwarcu */
#include <avr/io.h>
#include <util/delay.h> /* Kiedyś <avr/delay.h> */
int main(void)
{
DDRB |= _BV(0); /* PB0 jako wyjście */
for (;;)
{
unsigned char i;
PORTB ^= _BV(0); /* Zaneguj stan PB0 */
for (i = 0; i < 50; i++)
{
_delay_ms(10); /* Czekaj 0,5 sekundy */
}
}
return 0;
}
Na początku należy zadeklarować częstotliwość taktowania mikrokontrolera, by
pętle opóźniające odmierzały poprawnie czas. Pisząc oprogramowanie dla AVR-ów
zgodnie z zasadami sztuki, maski bitowe należy tworzyć za pomocą makra
_BV(). Dostępne wcześniej makra sbi() oraz cbi()
służące odpowiednio do ustawiania i zerowania bitów, zostały usunięte. W zamian
korzysta się ze standardowych konstrukcji języka C — kompilator będzie
wiedział, gdzie można użyć instrukcji zmiany pojedynczego bitu, a gdzie
trzeba użyć operacji logicznej na wartości rejestru.
Na szczególną uwagę zasługuje pętla opóźniająca. Częstym błędem jest
używanie funkcji _delay_us() i _delay_ms() z dużymi
wartościami opóźnień. Zgodnie z dokumentacją, maksymalne wartości to 768 µs na 1 MHz oraz 264,14 ms na 1MHz częstotliwości zegara. Wynika z tego, że na przykład
przy kwarcu 10 MHz, maksymalne opóźnienia to 76,8 µs i 26,4 ms. Dla dłuższych
czasów należy wywoływać w pętli opóźnienia o mniejszej wartości.
Mając już gotowy plik źródłowy, możemy go skompilować i zaprogramować nim mikrokontroler:
avr-gcc -mmcu=at90s2313 program.c -o program
avr-objcopy -O ihex program program.hex
avrdude -c stk200 -p at90s2313 -U flash:w:program.hex
Pierwsza komenda skompiluje program i połączy go z biblioteką standardową. Druga wyciągnie z pliku formatu ELF binarną sekcję kodu. Ostatnia wyzeruje zawartość pamięci Flash mikrosterownika, zapisze program i sprawdzi, czy programowanie przebiegło poprawnie. To wszystko!
Co dalej?
Najlepiej zacząć od lektury dokumentacji biblioteki standardowej i nie zapomnieć o sekcji FAQ, która zawiera odpowiedzi na większość podstawowych pytań. Przykładowe aplikacje można znaleźć w serwisie AVR Freaks Pytania najlepiej zadawać na grupie dyskusyjnej pl.misc.elektronika, ale tylko jeśli odpowiedzi nie znajdziesz w sieci. Powodzenia!